🤖 Grasp Stability Prediction
Predicting whether a robotic grasp is Stable or Unstable from tactile sensor images using deep learning.
Predicting whether a robotic grasp is Stable or Unstable from tactile sensor images using deep learning.
In robotic manipulation, a central question is whether a planned grasp on an object will be stable once executed. Failed grasps mean drops, retries, and potentially damaged objects. Visual information alone is often not enough; tactile feedback provides rich information about contact, pressure distribution, and local geometry.
This project explores how to treat tactile sensor images as input to a deep learning model that predicts grasp stability. The goal is to provide a fast, data-driven decision about stability that could be integrated into a grasp planning pipeline, while still being simple enough to deploy as a web demo.
The dataset was cleaned to remove ambiguous or corrupted samples and balanced to avoid bias toward one class (for example, if there are more stable than unstable grasps).
The model design is based on transfer learning with a convolutional network backbone and a lightweight classifier head. The main steps are:
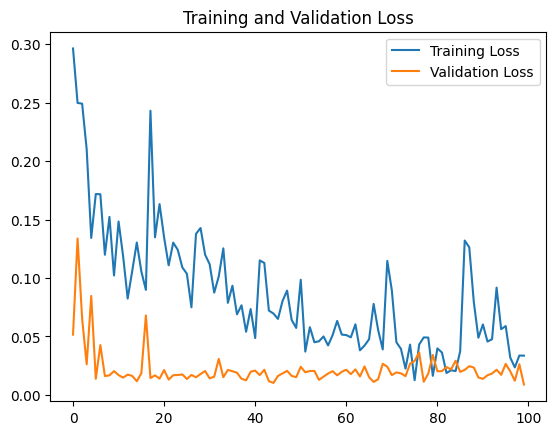
The model learns a clear separation between stable and unstable grasps on the held-out test set. In practice, the demo correctly identifies many cases where the contact pattern indicates instability even if the scenario might appear reasonable at first glance.
For a production setting, the next step would be to benchmark this model against alternative baselines (e.g. hand-crafted features, simpler CNNs) and test its robustness on data collected from different objects and sensor setups.
The codebase is structured to separate data loading, model definition, training loops, and the Gradio UI, making it easier to iterate on the model architecture without touching the deployment layer.
Overall, this project reinforced the value of combining a solid baseline architecture (ResNet18) with careful problem framing and deployment, rather than over-complicating the model from the start.